MojiKit is a design toolkit that helps people create emotionally expressive behaviors for animal-inspired robots. Drawing inspiration from everyday human–pet interactions, MojiKit bridges intuitive emotional understanding with hands-on robotic prototyping. It enables designers, researchers, and students to explore how simple animal-like movements—such as approaching, tail wagging, or curling up—can convey comfort, affection, playfulness, and companionship in human–robot interaction.
Rather than replicating animal behavior with biological fidelity, MojiKit focuses on how humans interpret animal behaviors emotionally, and how these interpretations can be translated into readable, meaningful robot interactions.
Designing emotional behaviors for pet-like robots is often driven by intuition and personal experience, which makes results hard to reproduce or extend. MojiKit offers a middle ground:
MojiKit is designed as a creative probe—supporting exploration, iteration, and imagination beyond the robot itself.
At the core of MojiKit is a structured design resource grounded in how people naturally experience and interpret everyday interactions with pets. The toolkit is informed by systematic analysis of human–pet interaction videos involving cats and dogs, complemented by insights from ethological literature on animal behavior and emotional signaling, as well as interviews with experienced pet owners. Together, these sources capture not only observable animal actions, but also the meanings, intentions, and emotional interpretations that humans attribute to them.
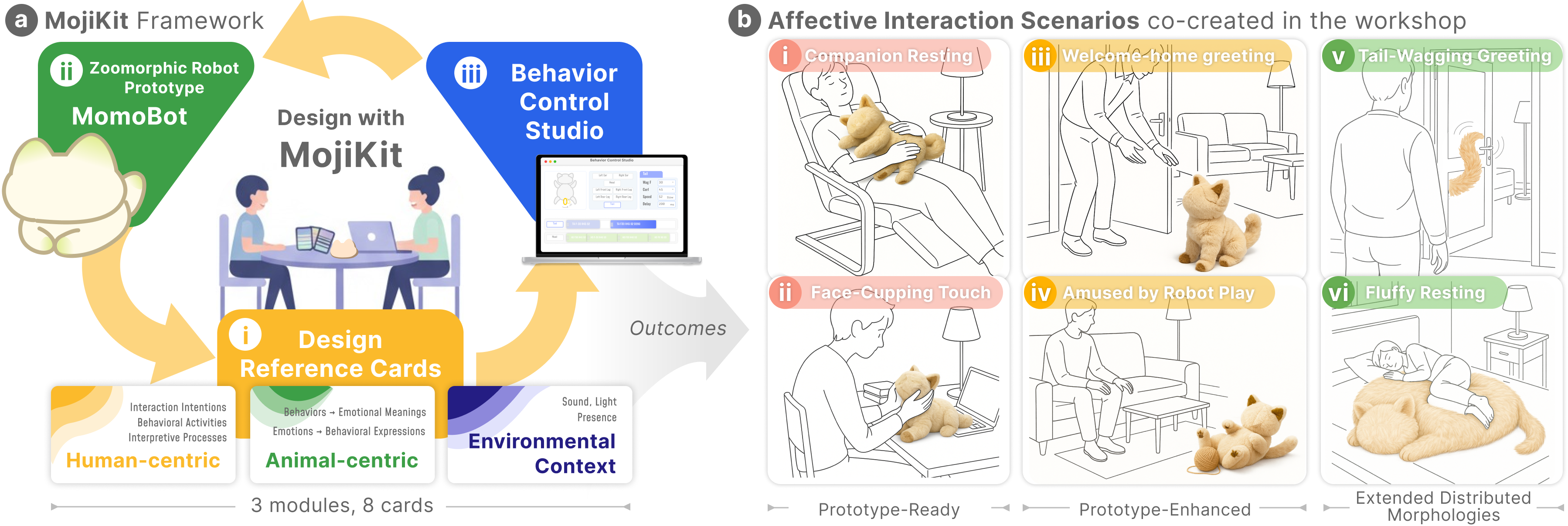
These insights are distilled into a set of Design Reference Cards, organized across three perspectives:
Together, the cards make the design space of affective human–pet interaction explicit and reusable, helping users reason about emotion, behavior, and context in a systematic yet flexible way.

MojiKit integrates three tightly connected components:
1. Design Reference Cards
A card-based system that supports multiple entry points into emotional interaction
design—whether starting from a human need, an animal behavior, or a situational context.
2. Zoomorphic Robot Prototype (MomoBot)
A plush, animal-inspired robot with articulated ears, limbs, head, and tail. Its abstract
appearance intentionally avoids facial expressions, shifting attention to body movement as the
primary emotional channel.
3. Behavior Control Studio
A code-free, timeline-based interface that allows users to compose, parameterize, and test robot
behaviors in real time. Simple motion primitives can be combined into expressive sequences,
enabling rapid iteration and embodied feedback.


MojiKit was evaluated through a series of co-creation workshops with participants from design and HCI backgrounds. Working in pairs, participants used the toolkit to design emotionally expressive interaction patterns for the robot, drawing on both their own experiences and the provided design resources. Across the workshops, participants created a total of 35 distinct affective interaction patterns, covering scenarios such as greeting, comfort, play, attention-seeking, and everyday companionship. Using simple motion primitives as building blocks, participants were able to compose richer, interpretable emotional sequences that conveyed intention, mood, and relational cues.
Both participants with and without prior pet experience were able to engage creatively with the toolkit, using the design reference cards as scaffolding and inspiration rather than strict prescriptions. Quantitative and qualitative findings showed that MojiKit effectively lowered technical barriers to robot behavior design, supported creativity, collaboration, and exploration, and encouraged participants to imagine interaction concepts beyond the robot's current capabilities—such as incorporating sound, warmth, or distributed animal-like features embedded in everyday environments.

Liwen He, Pingting Chen, Ziheng Tang, Yixiao Liu, Jihong Jeung, Teng Han, and Xin Tong. 2026. From Pets to Robots: MojiKit as a Data-Informed Toolkit for Affective HRI Design. In Proceedings of the 2026 CHI Conference on Human Factors in Computing Systems (CHI '26), April 13–17, 2026, Barcelona, Spain. ACM, New York, NY, USA, 25 pages.